Disciplines for the 2013 contest
Last year the robots were brought between roses. After one year the robots returns to perform their tasks on field. This time will not be maize, as was previously events, but the competition areas will be sown with sunflower plants.

Five competing tasks will be prepared. Traditional tasks will consist of the correct orientation and navigation in the crops. The link with precision agriculture will be primarily noticeable in the third task, where will be prepared combination of tasks consisting of real weed plants detection and damaged plants.
Popular disciplines belongs Freestyle, where the teams will present work of a robot of their own design. With regards to the last annual was highly appreciated the team cooperation. This is also back this year. Individual competition teams will be asked to work together.
General rules
-
Because we are developing autonomous robots, it is NOT allowed to follow the robot with laptop, controller or other devices. One person is allowed to follow the robot, without any electronics. This person only can reposition the robot in case the path is not followed or in case of emergency press a button on the robot.
-
During the tasks the robots will have to wait in a Parc Fermé, so that no further testing or modification is possible. Between the tasks there will be a 10 minute break for the teams to prepare their robots for the next challenge (change batteries, …).
-
From the moment a robot is given permission to start, it must start within one minute. If the robot doesn’t start within this time, it has one more chance to start after all other teams. If it does not start within one minute for the second time, the robot is disqualified for that task.
-
Large robots and/or robots with a probability of destroying the field will always start after the other robots have performed their tasks AND after all second chances restarted.
Awards
Performance of competing teams will be assessed by an independent expert jury. Besides measuring will be evaluated creativity and originality especially in tasks Cooperation and Freestyle. There will be an award for the first three ranks of each task. The basic, advanced and professional tasks together will yield the overall winner of the Field Robot Event 2013.
If two or more teams have the same number of points for the overall ranking, the team with the better placements during all three tasks will be ranked higher.
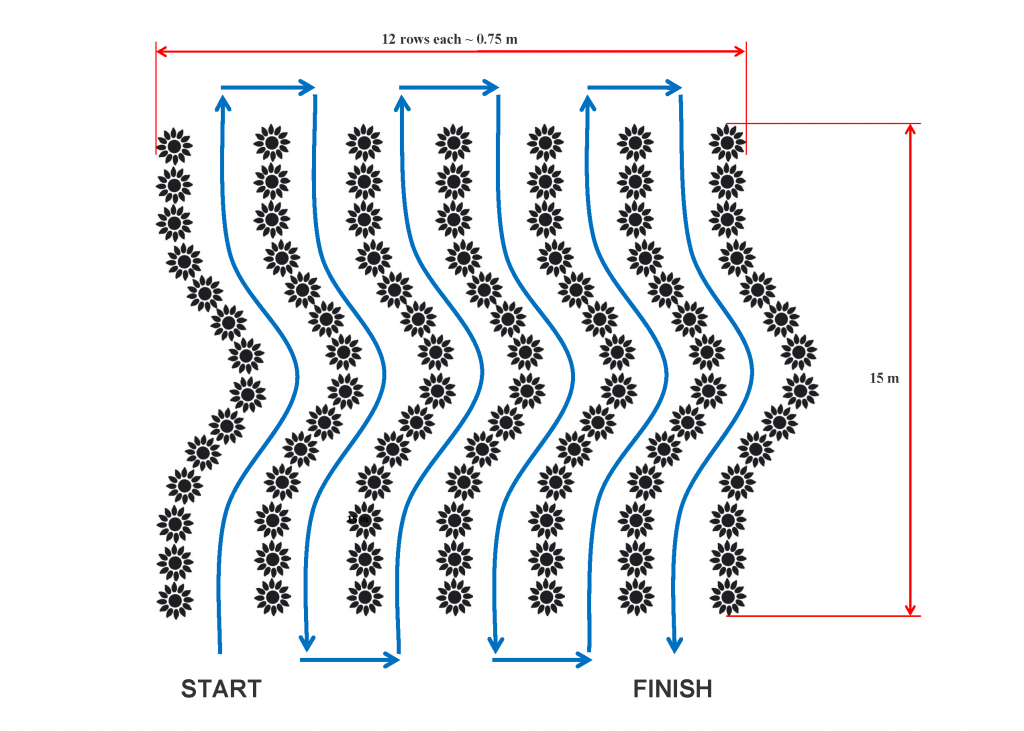
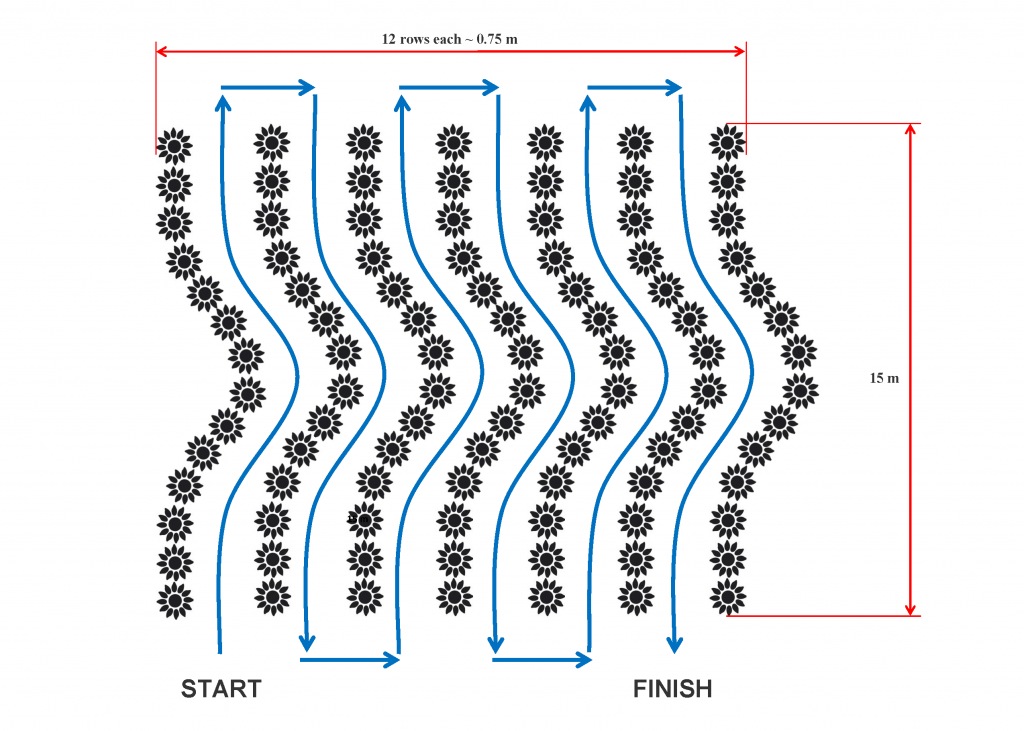
Task 1: “Basic”
Within three minutes the robot has to navigate through long curved rows of sunflower field. The goal is to cover as much distance as possible. On the headland, the robot has to turn and return in the adjacent row. There will be no plants missing in the rows. This task is all about accuracy and smoothness of operation within the rows.
At the beginning of the match it will be told whether starting is on the left side of the field (first turn is right) or on the right side (first turn is left). This is not a choice of the team but of the officials. So, make sure your robot is able to perform both options! A headland of 1.5 meters will be available for turning.
Assessment:
1. The distance travelled in 3 minutes is measured. If the end of the field is reached within 3 minutes, the total time counts. Distance and time are measured by officials;
2. Manual intervention within the rows results in a penalty of 3 meters (per touch). The number of touches is counted by the officials;
3. A manual intervention at the end of a row to help the robot entering the next row will be punished with a penalty of 5 meters. The robot should make the turn by itself;
4. Destroying a plant (e.g. kinked sunflower stem) results in a penalty of 1 meter (per plant). The officials will decide whether a plant is broken or not.
5. Distance and time results in a team ranking.
6. Numbers 1 to 3 will be rewarded with a prize for their achievements in this task. This task, together with tasks 2 and 3, contributes to the overall FieldRobotEvent2013 Championship. Points will be given as follows (similar to Formula1 point system): First place in this task: 10 points - Second place: 8 points - Third place: 6 points - …5-4-3-2-1-1-1-1… points. Participating results in at least 1 point. Not participating in this task results in 0 points.
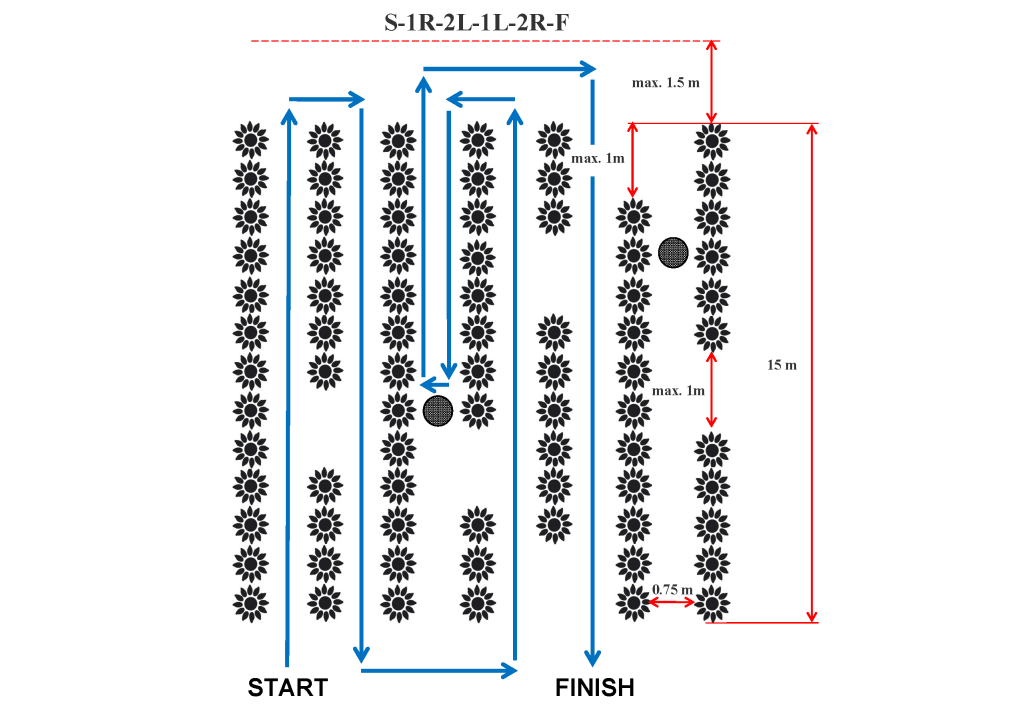
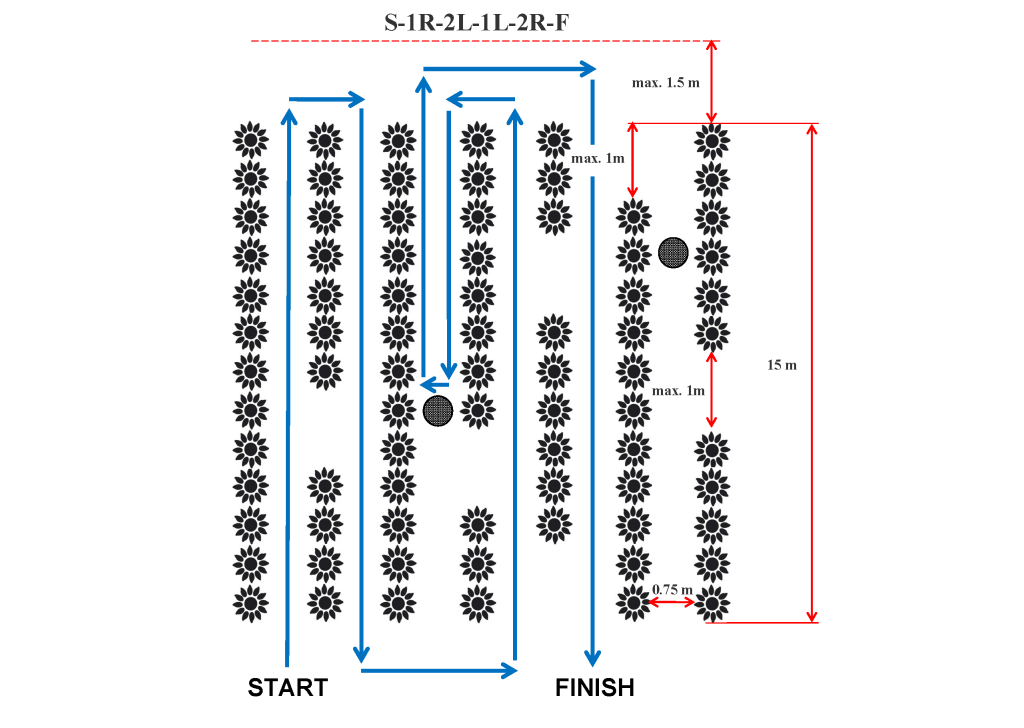
Task 2: “Advanced”
In real conditions, vegetation is not fully balanced and obstacles may be presented in the fields. Also the shape of the land where the opposite sides are not parallel is considered as a standard. We will approach these conditions in the second task
The robot should cover as much distance as possible within 5 minutes while navigating between straight rows of sunflower plants. The robot has to follow a certain pre-defined pattern over the field. At various places in the sunflower field, plants will be missing in either one or both rows over a length of maximally 1 meter.
Further obstacles (such as electricity pylon) can be moved in the rows and block the path of the robot. The robot has to move backwards and continue with the coded pattern. The coded pattern takes blocked paths into account.
The headland border may not be perpendicular to the crop row orientation. The difference in length of two subsequent rows will be less than 1 meter. A headland of only 1.5 meters will be available for turning.
Coding of the row-pattern through the sunflower field is done as follows. S means start, L means left-hand turn, R means right-hand turn and F means finish. The number before the L or R represents the row that has to be entered after the turn and the single number 0 means return in the same path. So, 2L means: enter the second row after a left-hand turn. 3R means: enter the third row after a right hand turn. The code row-pattern will be given as (example): S - 3L - 0 - 2L - 2R - 1R - 5L - F.
The code of the pattern is made available to the competitors 10 minutes before the start of the competition. Competitors do not have the opportunity to test it in the sunflower field.
Assessment:
1. If the robot enters the wrong row after the headland turning, if there is intervention during the headland it results in placing the robot back to the start and re-start the task. The distance travelled in 5 minutes is measured. If the end of field is reached within this time, the total time counts. Distance and time are observed by officials;
2. Manual intervention within the rows results in a penalty of 3 meters (per touch). The number of touches is counted by the officials;
3. Destroying a plant (e.g. kinked sunflower stem) results in a penalty of 1 meter (per plant). The officials will decide whether a plant is broken or not.
4. The best result achieved during the interval of 5 minutes will be counted will be counted in the final evaluation. Distance and time results in a team ranking. Numbers 1 to 3 will be rewarded with a prize for their achievements in this task. This task, together with tasks 1 and 3, contributes to the overall Field robot event 2013 championship. The following sequence for the overall points is used: 10-8-6-5-4-3-2-1-1-1-1… Not participating in this task results in 0 points.
The following picture shows an example of how the track could look like for task 2. The gaps in the rows and the drive pattern will be different at the real event!
Task 3: “Professional”
The third task is again based on the real requirements of precision agriculture. This will be a combined task, which will consist of three subtasks that will be performed simultaneously during journey.
Subtask 1: Navigation through long curved rows of sunflower field
Subtask 2: The weed plant detection and finding signalization
Subtask 3: The infected plants detection and finding signalization
Subtask 1: Within five minutes the robot has to navigate through long curved rows of sunflower field. On the headland, the robot has to turn and return in the adjacent row. There will be no plants missing in the rows. This task is all about accuracy and smoothness of operation within the rows. At the beginning of the match it will be told whether starting is on the left side of the field (first turn is right) or on the right side (first turn is left). This is not a choice of the team but of the officials. So, make sure your robot is able to perform both options! A headland of 1.5 meters will be available for turning.
Subtask 2: In the sunflower plants rows real weed plants patches will be randomly distributed. In this case, maize and oil seed rape (canola) will present weeds. Minimum of 2 plants will represent the patches. The successful detection has to be characterized by an audible and visual signal. Additionally it must be shown on which side of the row the weed has been detected.


Subtask 3: Selected plants of sunflower in a row will show damage or pest infestation. Minimum of 2 plants and maximum of 4 plants of infected plants will represent patch. The successful detection has to be characterized by an audible and visual signal. Additionally it must be shown on which side of the row the infected plant has been detected.

Assessment:
Subtask 1: A manual intervention within the rows, a manual intervention at the end of a row to help the robot entering the next row and destroying a plant (e.g. kinked sunflower stem) results in a penalty of 1 point (per touch) or 1 point (per plant). The number of touches or plants is counted by the officials. The distance travelled and time will be measured. Measured values will be used in the event of the same result among more teams.
Subtask 2 and 3: 5 points will be given for each correct detection. Incorrect detection results in a penalty of 5 point.
Destroying a plant (e.g. kinked sunflower stem) results in a penalty of 1 meter (per plant). The officials will decide whether a plant is broken or not. Penalty sum, counted for 5 minutes interval, will be subtracted from the best achieved result.
Task 4 "Freestyle"
Robots are invited to perform a free-style operation on the field. Fun is important in this task as well as an application-oriented performance. One team member has to inform the jury and the audience about the idea. For the "Freestyle" challenge, the team should prepare an application related to the use of sunflower fields. Teams will have a time limit five minutes for presentation.
Assessment:
The jury ranks the idea and the robot performances at the end of the task, both with a mark from 1 to 10. These points are added and the team with the highest score gets 10 points, second position 8 points etc. According to the previous mentioned sequence: 10-8-6-5-4-3-2-1-1-1-1…
This task is optional and will be awarded separately. This task does not contribute to the overall Field Robot Event 2013 championship.
Task 5 “Cooperation”
On the third day groups of two teams will participate in a cooperative freestyle task. The teams will be chosen by the organizer and will be pronounced as early as possible. So there is much time to prepare. The groups choose their own task but it has to be a task with two robots working together. The field can be changed as desired. For this purpose there has to be a communication between the robots. This is a nice step forward in technology because communication between field robots will be very important in the future. Everything is possible in this task as long as it is cooperative. Teams will have a time limit five minutes for presentation.
Assessment:
The jury ranks the idea and the robot performances at the end of the task, both with a mark from 1 to 10. The idea and the quality (communication) of the cooptask are most important. These points are added and the team with the highest score gets 10 points, second position 8 points etc. according to the previous mentioned sequence: 10-8-6-5-4-3-2-1-1-1-1…
This task is optional and will be awarded separately. This task does not contribute to the overall Field Robot Event 2013 championship.
Last update: 17 January 2013